[ショールーム探訪vol.17]顧客の声ダイレクトに拾い上げる/シュンク・ジャパン「CoLab」(2/3)
AIの活用も
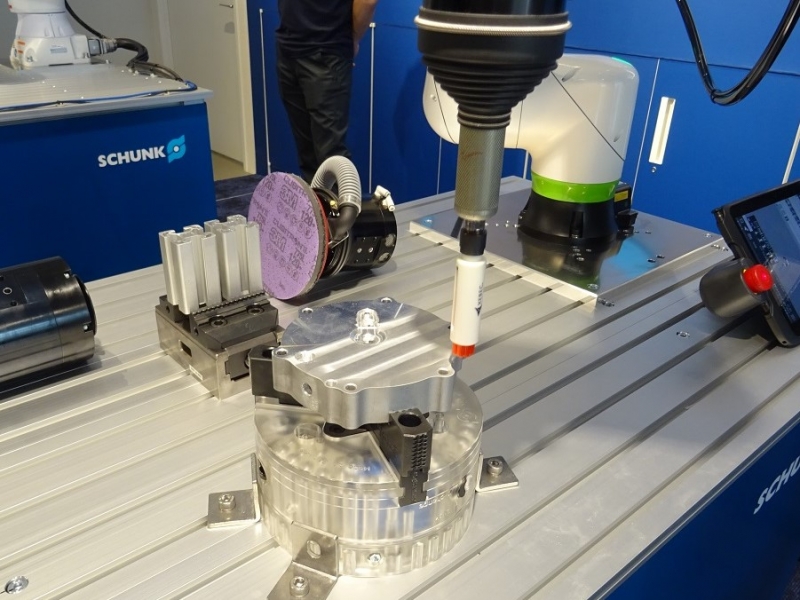
「切削工程のローディング・アンローディングの自動化提案」では、協働ロボット用エアグリッパー「MTB」とパワーチャック「ROTA(ロタ)-NC」を用いて、工作機械へのワークのローディング・アンローディングを実演する。やはりプラグインを用いることで、ティーチングペンダント側で、ワークをつかむ・離す、エアブローなどを制御できる。ロボットとチャック、ハンドの動きを統合する作業を削減できるため、立ち上げ時間の大幅な短縮を実現できる。
「AI物体認識を使った2Dランダムピッキング」は、物体認識ベースの人工知能(AI)アルゴリズム(計算手法)を用いたソフトウエアが、ワークの種類や姿勢、つかみしろを理解し、ロボットの動きをガイドする。従来のパターンマッチング方式の画像認識とは異なり、外乱要因の影響を受けにくく、ワークの傾きなどの変動にも対応するという。ワークを置く台であるシュンク製ボウルフィーダー「Flexbowl(フレックスボウル)」は、つかめるワークがないとAIが判断すると自動的に回転、振動し、保持できる位置にワークを移動させる。
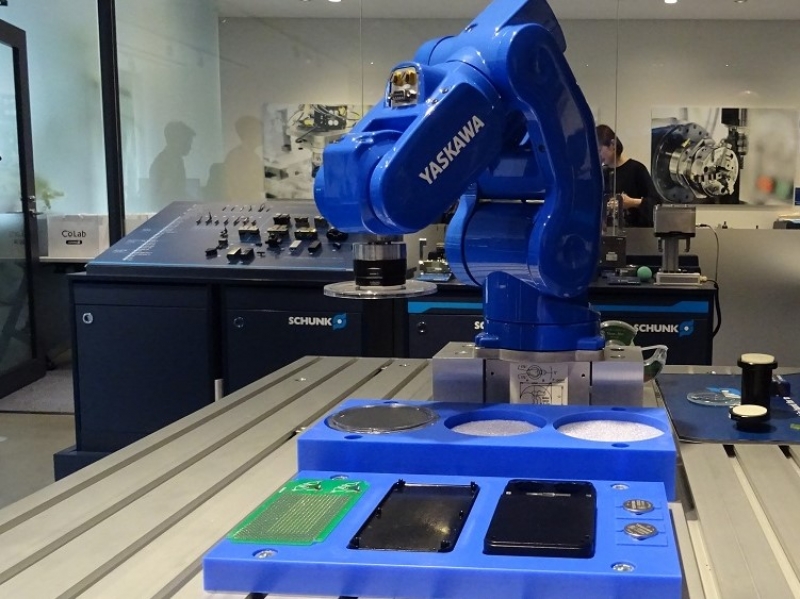
「Oリング自動挿入デモ」は、流体(気体、液体)をシール(密封)するための部品であるOリングの取り付けは人手で行うことが多いが、それを自動化するもの。Oリングのハンドリングに特化した「ORGグリッパー」は汎用性が高く、直径5mm~160mmまでのOリングに対応する。Oリングの外径、内径どちらも取り付けできる。
-
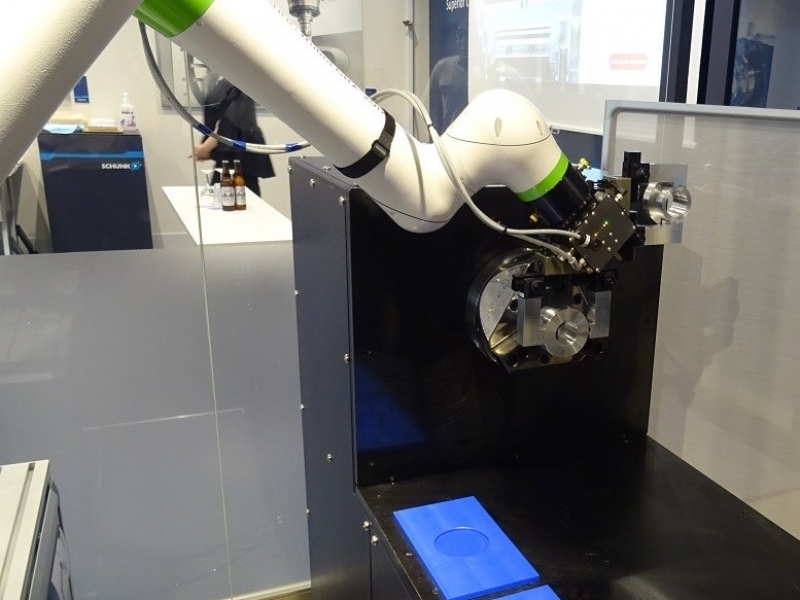
切削工程のローディング・アンローディングの自動化提案
-
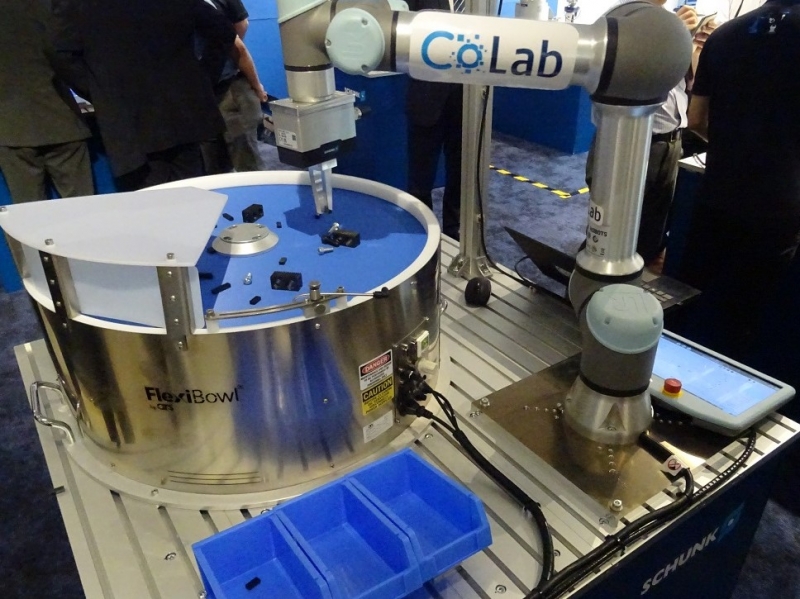
AI物体認識を使った2Dランダムピッキング
-

Oリング自動挿入デモ
ヤモリの手
シュンクは先進的な研究開発でも名高い。
「ゼロエネルギーグリッパーでの多品種ワークハンドリング」は、ヤモリの手の原理を模した粘着式グリッパー「ADHESO(アドヒーソ)」を用いる。ADHESOは、生体模倣技術でワークを保持するため、ワークをつかむためのエネルギーを一切使用せずに、複数種のワークをハンドリングできる。エアや電気などの配管・配線が不要なため自由度の高いアプリケーションが構築でき、従来は吸着搬送が難しかったメッシュ状の物や不織布などにも対応できる。
こんな変わり種を触らぬわけにいかない――。というわけで、記者もADHESOをべたべたと触りまくってしまった。
また、「バリ取り自動化デモ」は、シュンク独自のバリ取りユニットとバイスを用いる「オール・シュンク」のソリューションという。顧客の自動化のプロセスを踏まえ、どのようにワークを保持して加工フローを組むかなど、一連の流れをシュンク製品で構築できる。バリ取り工具はジーベックテクノロジー(東京都千代田区、住吉慶彦社長)製だ。
-
ゼロエネルギーグリッパーでの多品種ワークハンドリング
-
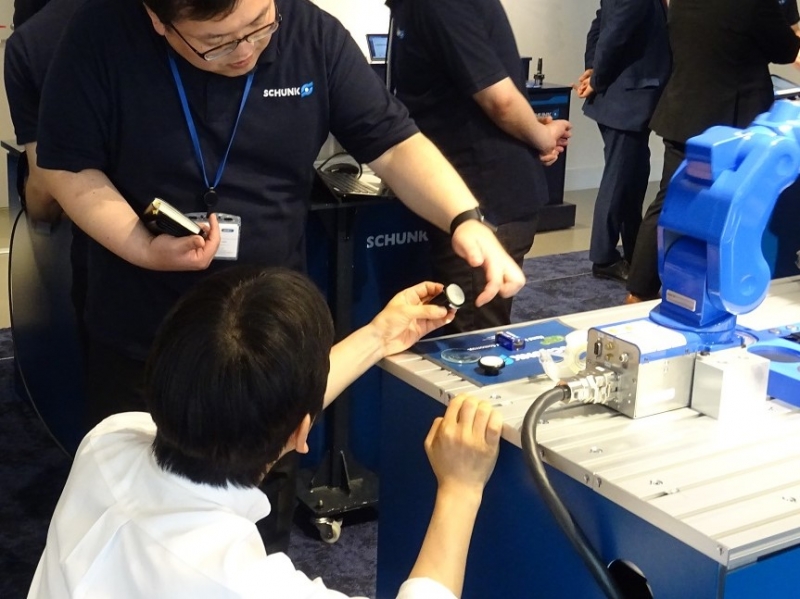
記者もADHESOに触れてみた
-
バリ取り自動化デモ

