[連載コラム:いまさら聞けないキーワード] vol.02 SLAM

最近よく聞く言葉だけど、「それどんな意味?」と聞かれたら自信を持っては答えにくい――。そんな言葉はありませんか? 新連載コラム「いまさら聞けないキーワード」では、そんなロボット業界のキーワード・新ワードを紹介します。第2回は、第1回で取り上げた「AMR」の誘導方式として多く使われるSLAMです。

前回紹介した「AMR」や、身近なところでは家庭用掃除ロボットにも採用される誘導方式が「SLAM(スラム)」。自律走行の肝となる技術です。Simultaneous Localization and Mapping(サイマルテニアス・ローカライゼーション・アンド・マッピング)の頭文字を取った言葉で、直訳すると「自己位置の推定と地図作成を同時に行うこと」となります。
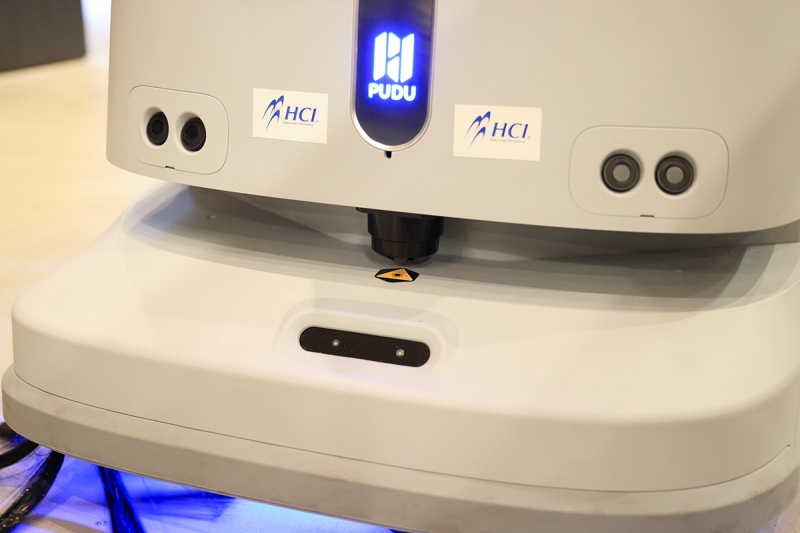
写真中央のLiDARと左右のレーダーを搭載する清掃用AMR(2023年10月17日掲載記事「中国プードゥーと提携し清掃ロボットを販売、工場にも提案/HCI」より)
そしてお気づきでしょうか。SLAMという言葉には、自己位置の推定と地図作成をする具体的な方法が含まれていません。実際SLAMには、搭載するセンサーによっていくつかの種類があります。
その一つ「LiDAR(ライダー)」はLight Detection and Ranging(ライト・ディテクション・アンド・レンジング)の略で、赤外線などのレーザーを照射し、その反射光をセンサーで捉えることで、障害物との距離を測定する方式です。その他、カメラで撮影した映像を解析して周囲の状況を把握する方式や、デプス(深度)カメラを使う方式などもあります。
AMRには精度に優れるLiDARを採用するケースが多いですが、それでも小さな誤差が累積し、地図上の位置と現実の位置のズレが大きくなる場合があります。また、レーザーを吸収してしまう黒い床や壁、レーザーが透過してしまうガラス面を検出しにくい弱点もあります。安全を確保するため、障害物検知を補助する他のセンサーを併用する機種も多く見られます。
LiDARに関するトレンドとしては、1本のレーザーを水平方向に照射し回転させる2D LiDERだけでなく、複数のレーザーを縦に束ねて照射するなどして3次元的に周囲を把握できる3D LiDARも普及しつつあります。また、機械回転式からソリッドステート式へ、といった構造的な進化も起きていますが、難しい話になるのでまたの機会に。
AMRを比較する時、SLAMを含めた誘導方式の違いに注目してみるのも面白いですよ。
複数のAMRをまとめて比較できる場としては展示会が最適です。第3回では、昨年初めて開催された産業用ロボット専門展示会「ロボットテクノロジージャパン」を紹介します。

