[SI基礎講座vol.19] 導入ステップ③
ロボットのシステムインテグレーション(SI)に関する基礎知識を紹介する本連載企画。「ロボット導入ステップ」の3回目となる今回は、ロボット導入前の地ならしのステップ3について詳しく解説する。
〔今回の講師:中小機構 経営支援アドバイザー 加藤栄作先生〕
――― ――― ――― ――― ――― ―――
【今回のポイント!】
〇まずは現場の改善から
〇ロボットの可動率を高める取り組みを
〇予算を考慮し、自動化すべき範囲を見極める
「地ならし」のステップ3とは
地ならしの取り組みを推進する(SI基礎講座、スライド資料より)
「ロボット導入ステップ②」では「地ならしの取り組みステップ」のステップ1とステップ2を説明しましたが、引き続きステップ3以降を紹介していきます。
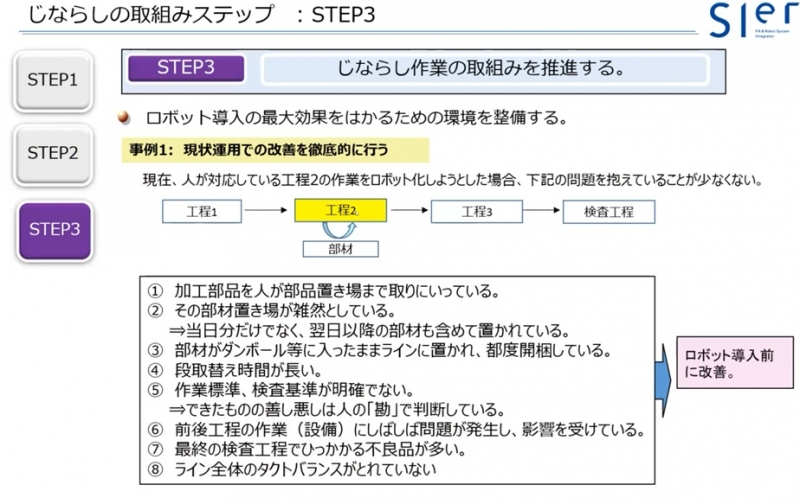
ステップ3では、いよいよ地ならし作業の取り組みを推進します。つまり、現状を改善する活動を進めるということですね。
右資料の下部には現場でよくある問題が書いてありますが、こういったものがあればロボットを導入する前までに改善に取り組んでいただく必要があります。
ボトルネックになっている工程があれば、これも事前に解決する。ボトルネック工程にロボットなどの自動化設備を入れるというのも一つの答えですが、その前にできることがないかきちんと考えるようにしましょう。
「生産技術概論②」でお話ししたラインバランシングも考えましょう。レイアウト変更や工程結合、生産方式の変更なども検討しましょう。ロボットなどの自動化設備を入れなくても改善できることは多いですし、自動化設備の導入と比べればお金をかけずにできますよね。
ロボットの可動率を上げる仕組み作りを行う(SI基礎講座、スライド資料より)
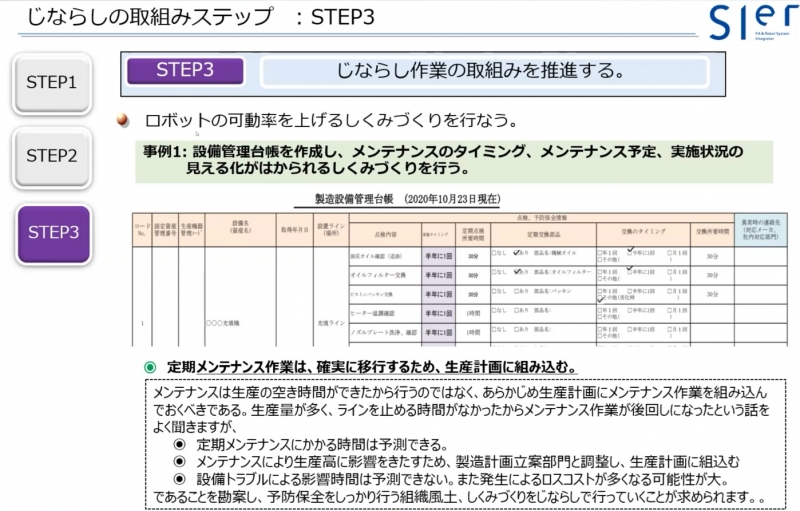
ロボットの可動率を上げる仕組み作りも行いましょう。可動率については「生産技術概論⑥」でお話ししましたね。設備保全をどう考えるのか。やはり基本は予防保守・予防保全ですよね。
トラブルで設備が止まってからではなく、止まる前に手を打つべきです。定期的なメンテナンスも当然ありますが、破損する前に何らかの兆候が表れるのならその兆候を捉える。そうでなければ稼働の時間や回数に着目するなど、いろいろと考えることはできます。

