[気鋭のロボット研究者vol.8]CAMでロボットの動作プログラムを【後編】/金沢大学浅川直紀教授
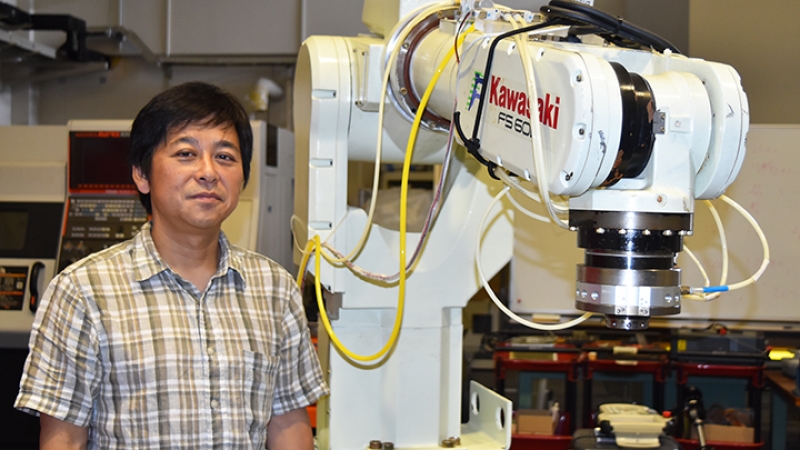
産業用ロボットを使ってバリ取りや面取り、磨きなどの加工を自動化する研究に力を注ぐ金沢大学の浅川直紀教授。ティーチング(ロボットに動作を覚えさせる一般的な方法)でロボットを動かすのではなく、「CAM」と呼ばれるソフトウエアを使って動作プログラムを生成しようと模索する。CAMを使う時に重要なのは「一つ一つの作業を数学的に表現すること」と強調する。
生産現場のロボット化と自動化を支援するウェブマガジン
RECENT POSTS
産業用ロボットを使ってバリ取りや面取り、磨きなどの加工を自動化する研究に力を注ぐ金沢大学の浅川直紀教授。ティーチング(ロボットに動作を覚えさせる一般的な方法)でロボットを動かすのではなく、「CAM」と呼ばれるソフトウエアを使って動作プログラムを生成しようと模索する。CAMを使う時に重要なのは「一つ一つの作業を数学的に表現すること」と強調する。
金沢大学の浅川直紀教授は、産業用ロボットを使ってバリ取りや面取り、磨きなどの機械加工を自動化する研究に力を注ぐ。ロボットは通常、ティーチング(ロボットに動作を覚えさせること)を通じて動作プログラムを生成する。しかし、浅川教授は「ティーチングレス主義」を掲げ、「CAM」と呼ばれるソフトウエアを使ってロボットの動作プログラムを作ろうと模索している。
「ロボットの不器用な動きを滑らかにしたい」。相山康道教授は、約30年前の学生時代に抱いた思いからロボットの動作研究を続ける。ロボット研究では近年、制御や機械学習のソフトウエアで動作精度を高める潮流が強いが「まだまだメカの工夫でやれることがある」と実直に取り組む。
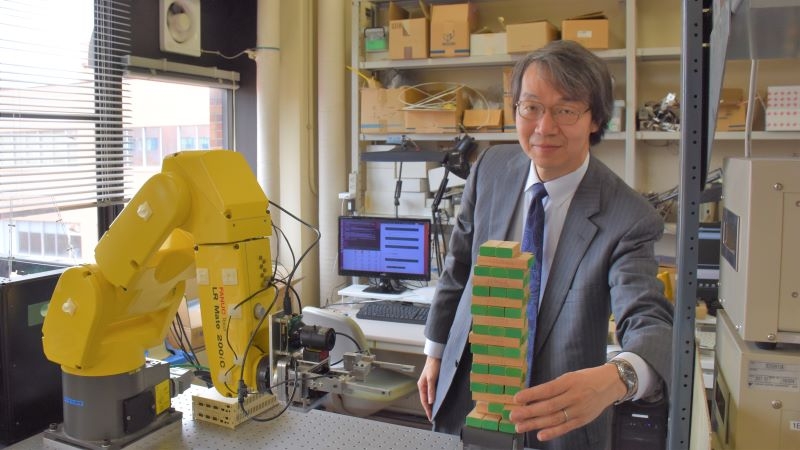
「ロボットの不器用な動きを滑らかにしたい」。相山康道教授は、約30年前の学生時代に抱いた思いからロボットの動作研究を続ける。最近では積み上げたブロックを倒さずに引き抜くゲーム「ジェンガ」でブロックを引き抜く技術を開発した。しかし「まだまだ人間に及ばない」(相山教授)という。
生産技術や生産システムを人工知能(AI)やモノのインターネット(IoT)で知能化し、最適な設備の配置やロボットの動作などをコンピューター上で再現する山本秀彦教授。シミョレーションで割り出されたデータを基に、設備や部品の保管場所を変更して効率化を実現した企業もある。
工場の生産性向上や自動化への取り組みに多くの企業が注力する。山本秀彦教授は、人工知能(AI)システムを利用した工場の知能化の研究を進める。無駄のない設備のレイアウト、無人搬送車(AGV)や双腕ロボットの作業効率の向上を実現し、モノのインターネット(IoT)を使った工場全体の最適化を提案する。
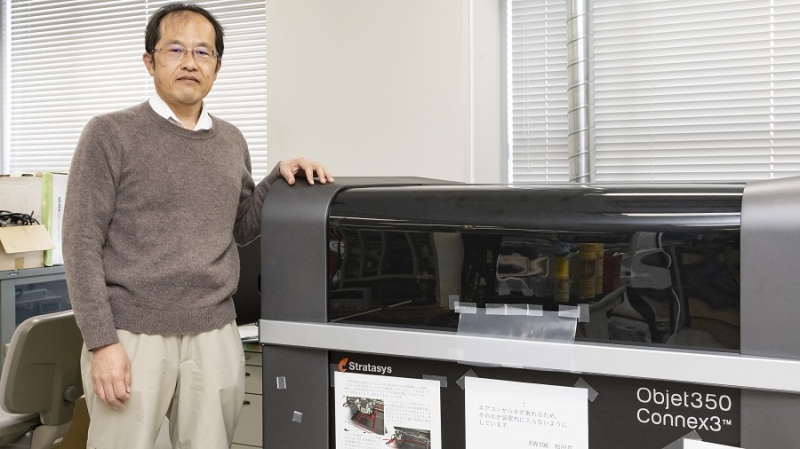
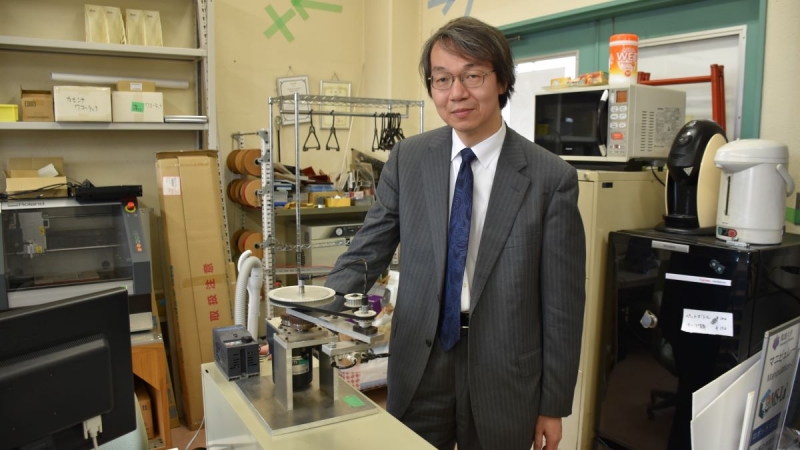
金属製のロボットハンドが多い中、平井慎一教授は樹脂やシリコン製のソフトハンドを研究、開発する。2017年度に研究室に3Dプリンターを導入したことでトライ・アンド・エラーのサイクルが速くなり、開発が進んだ。試行錯誤を経て開発したソフトハンドは実用化も近い。食品分野で広くロボットに適用できれば、需要の安定した市場に進出できる。
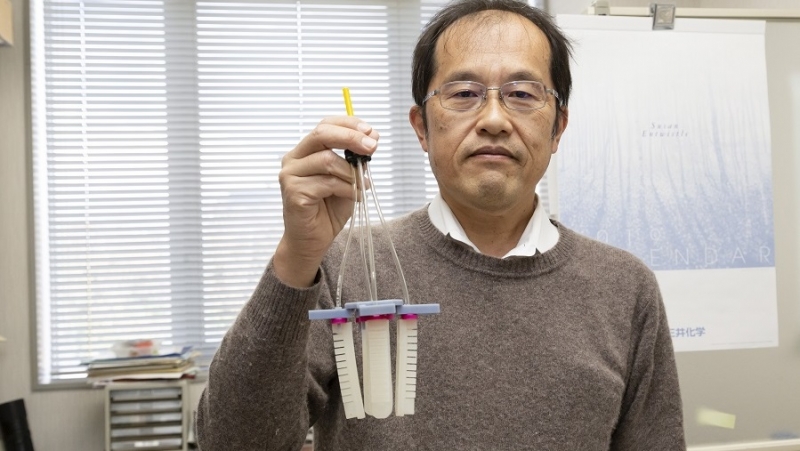
現実にある問題を出発点として研究を進める平井慎一教授。ソフトロボティクスを研究する平井教授が着目したのは、コンビニエンスストアなどの弁当におかずを詰める作業の自動化だ。産業用ロボットのハンドとしては珍しい、3Dプリンターを使って製作した「ソフトハンド」を研究する。2020年の実用化に向けテスト運用を始める。
連載4回目を迎えた今回は、3つの分野のセンシング・情報処理技術を主な研究テーマに掲げる中京大学の橋本学教授に話を聞いた。2018年12月3日にアップした前編では、産業用ロボットに関わる分野の研究として、ばらばらに積まれた物体をつかみ上げる(ピッキング)時に使われるロボットの視覚システムの事例を紹介した。後編では製造現場ではなく、一般家庭にロボットを導入する時に求められる視覚システムを取り上げる。橋本教授は、物体の形状から機能、つまりその物体の使い方を人工知能(AI)で推定する機能認識のシステムを開発した。

連載4回目を迎えた今回は、3つの分野のセンシング・情報処理技術を主な研究テーマに掲げる中京大学の橋本学教授を紹介する。橋本教授は、産業用ロボットに関わる分野では、ばらばらに積まれた物体をピッキングする時に使われるロボットの視覚システム、つまりロボットの“目”の役割を果たすシステムについて研究する。2013年には、ばら積みされた物体の位置や姿勢を効率的に認識できる「ベクトルペアマッチング」という独自のアルゴリズム(プログラムの問題解決手順や計算方法)を開発した。

