
カスタマーサポート体制を強化/スター精機
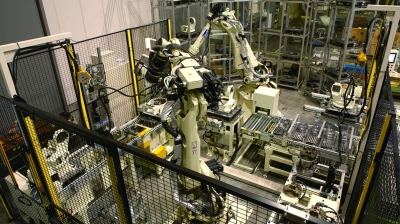
射出成型機用の取り出しロボットなどを得意とするスター精機(愛知県大口町、塩谷陽一社長)は3月29日、「カスタマーサポートサービス」を4月3日から開始すると発表した。従来は製品を購入した顧客からの問い合わせに対し、国内の各支店で対応していた。サービスの品質をさらに高めるため、専門の窓口を設置する。受付時間は同社の営業日の8時半~19時半。
生産現場のロボット化と自動化を支援するウェブマガジン
RECENT POSTS
射出成型機用の取り出しロボットなどを得意とするスター精機(愛知県大口町、塩谷陽一社長)は3月29日、「カスタマーサポートサービス」を4月3日から開始すると発表した。従来は製品を購入した顧客からの問い合わせに対し、国内の各支店で対応していた。サービスの品質をさらに高めるため、専門の窓口を設置する。受付時間は同社の営業日の8時半~19時半。

エプソンは『省・小・精』の技術を起点に、常に新たな価値創造へ取り組み、顧客の期待に応えることに挑戦し続けている。その1つとして「生産現場の革新」にも注力する。生産現場での働き手の不足や熟練工の減少、消費者ニーズの多様化などさまざまな顧客の課題がある。

日立製作所のグループ会社でビジョンセンサーや知能化ロボットシステムを開発、販売するKyoto Robotics(キョートロボティクス、滋賀県草津市、神田充啓社長)は3月22日、産業用ロボット向けの3次元ビジョンセンサー「TVS Lite series(ライトシリーズ)」に新製品を追加した。視野範囲を拡充し、より広い範囲の対象物や小さい部品などを認識できるようにした。

食品製造業向けに先端テクノロジーを提案する展示会「第2回フードテックジャパン大阪」が3月8~10日の3日間、大阪市住之江区のインテックス大阪で開催された。化粧品や医薬品の研究・製造展「第9回インターフェックスWeek(ウィーク)大阪」や「第9回再生医療EXPO(エキスポ)」と合わせ、3日間合計で約1万600人が来場した。ロボットによる自動化を提案する企業もあり、現場の人材不足に悩む来場者からの注目を集めた。

協働運搬ロボット「サウザーEシリーズ」を販売するDoog(茨城県つくば市、大島章社長)は4月、同シリーズとして「サウザーミニ」を新たにラインアップする。
ダイヘンは2月上旬、神戸市灘区の六甲事業所にある産業用ロボットの工場の設備をリニューアルした。今回のリニューアルでロボットの組み立てエリアから検査エリアへの工程間搬送を自律搬送ロボット(AMR)が担うようになった。現在、ロボットの組み立て工程は自動化できており、来年度中に検査工程までの自動化達成を目指す。
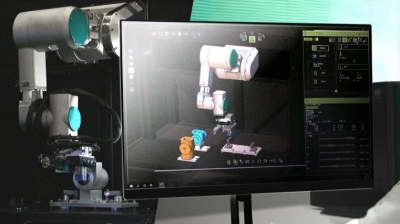
産業機械メーカーのスギノマシン(富山県滑川市、杉野良暁社長)は3月22日、産業用ロボット向けのソフトウエア「CROROROS(クロロロス)」を発売した。3次元空間上でロボットの動作のシミュレーションやティーチング(教示)ができる。
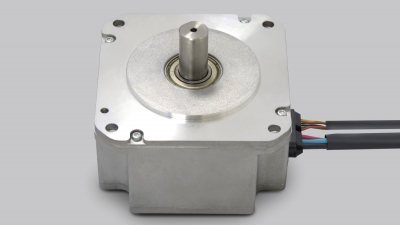
マブチモーターは3月27日、ブラシレスモーター「IS-B5BZA」を発売したと発表した。無人搬送車(AGV)や自律移動式搬送ロボット(AMR)などの駆動用に適する。定格出力は600Wで、既に発売済みの200Wや260Wのタイプと比べて、高いトルクを確保できる。高積載で搬送するAGV・AMRの機動性向上に貢献する。厚さ54mmの薄型設計で、防水性能も備える。
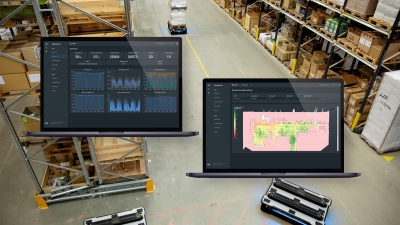
デンマークの自律移動型搬送ロボット(AMR)メーカーのモバイル・インダストリアル・ロボット(MiR)は3月22日、AMRの運用管理者向けのクラウドベースのソフトウエア「MiR Insights(インサイツ)」を発表した。AMRの運用台数が多い場合に最適で、運用管理に関する各種機能や運用状況の分析、パフォーマンス向上のための情報などを提供する。「ユーザーはより迅速に設備の改善と拡張を続けられ、投資収益率(ROI)をさらに向上させることができるようになる」とウォルター・ヴァーヘイ社長はコメントを発表した。

各種不織布などを製造・販売する前田工繊(東京都港区、前田尚宏社長)は3月15日、グループ会社の未来コーセン(福井県南越前町、田中則夫社長)がロボットアーム用のカバーを発売すると発表した。

