
[ロボットが活躍する現場vol.33] ロボット切削で鋳物の砂型を直接造形! 次世代鋳造技術を共同開発/オークマ、木村鋳造所
大手工作機械メーカーのオークマと鋳造部品メーカーの木村鋳造所(静岡県清水町、木村 寿利社長)は共同で、次世代鋳造技術を開発した。ロボットで砂型を直接切削加工し、上型と下型の精密な型合わせや中子(なかご、型の内部空間に収める鋳型部品)の挿入なども全て自動でこなす。
生産現場のロボット化と自動化を支援するウェブマガジン
RECENT POSTS
大手工作機械メーカーのオークマと鋳造部品メーカーの木村鋳造所(静岡県清水町、木村 寿利社長)は共同で、次世代鋳造技術を開発した。ロボットで砂型を直接切削加工し、上型と下型の精密な型合わせや中子(なかご、型の内部空間に収める鋳型部品)の挿入なども全て自動でこなす。

多田隈理一郎教授は、全方向に駆動する「球状歯車」の研究で注目を集める。当初は樹脂製だったが、より耐久性を高めるために工作機械の5軸マシニングセンタ(MC)でアルミ合金製の球状歯車を作った。球状歯車をロボットの関節や搬送装置に搭載することで、従来に比べ素早く柔軟な動作を実現できるようになる。

ヒト型ロボットは大きな注目を集めている分野の一つだ。産業用ロボットとして提案するメーカーは多岐にわたるアプリケーションを披露し、実用性の高さをアピールする。一方、ヒト型ロボットを研究用途に提案する企業もあり、価格競争力の高さなどを武器に攻勢をかける。vol.23ではヒト型ロボットの各社の展示を紹介する。
ダイフクは2023年12月19日、滋賀県日野町の滋賀事業所内に新設した第二高層棟で、最新の高速・高層自動倉庫クレーンの走行実験を開始したと発表した。
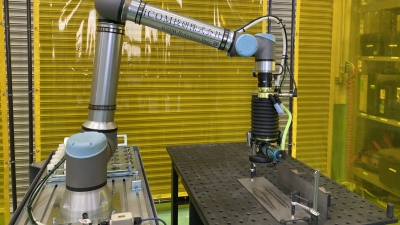
今回紹介するiCOM技研(アイコム技研、兵庫県小野市、山口知彦社長)は、ユニバーサルロボット(UR)の協働ロボットを使った自動化システムの構築に強みを持つ。これまでの自動化のノウハウを基に、自動化システムのパッケージ化にも取り組む。2022年からは人工知能(AI)とビジョンセンサーを使ったティーチング(教示)レスシステムの研究開発を始めた。来年には研究開発施設として、「AI Robotics Labs(AIロボティクスラボス)」をオープンし、ティーチングレスシステムの研究に加えて、人材育成用教材パッケージの試作にも力を入れる。

中部大学は12月14日、愛知県春日井市の春日井キャンパスで「第27回中部大学テクノフェイスフォーラム」を開いた。リアルとウェブのハイブリッド開催で、リアル会場には工作機械やFA(ファクトリーオートメーション=工場自動化)機器メーカーなどから約35人が参加した。

「進化計算」と呼ばれる手法と画像処理をミックスさせた研究に取り組む岐阜大学の佐藤惇哉助教。「気鋭のロボット研究者」の後編では、進化計算を生かしたボルトのばら積みピッキングの研究事例を取り上げる。人工知能(AI)と違って大量の学習データを用意する必要がなく、たった1枚のテンプレート画像だけでボルトの把持位置を認識できるという――。

製造業や物流業、農業、医療などさまざまな産業で注目を集める画像処理技術。岐阜大学の佐藤惇哉助教は画像処理技術を専門とし、産業界での実用化を見据えた研究に力を注ぐ。「進化計算」を呼ばれる手法を画像処理に適用することで、画像処理に欠かせないパラメーター調整の作業を自動化できるという。
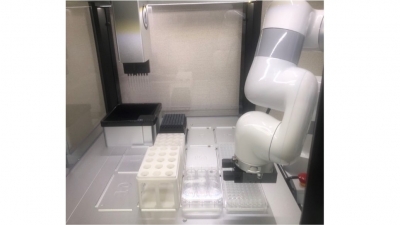
協働ロボットや教育用ロボットなどを販売するGRIPS(グリプス、千葉県流山市、森田康社長)は9月26日、研究室や臨床現場で試料などを一定量吐出する分注作業を自動化するロボットシステムの開発に着手したと発表した。

日本ロボット学会は9月11日~14日の4日間、仙台市内の仙台国際センターで「第41回日本ロボット学会学術講演会(RSJ2023)」を開いた。初日はA~Fの6会場に分かれて「オープンフォーラム」を開催。2日目以降はA~Lの12会場に分かれて「オーラルセッション」などを行った。日頃の研究成果の発表に加え、「サステナブルな社会の構築・発展に貢献するロボット技術」をスローガンにさまざまなプログラムを実施した。

