[気鋭のロボット研究者vol.13]柔軟物も確実にグリップ【後編】/関西大学 高橋智一准教授
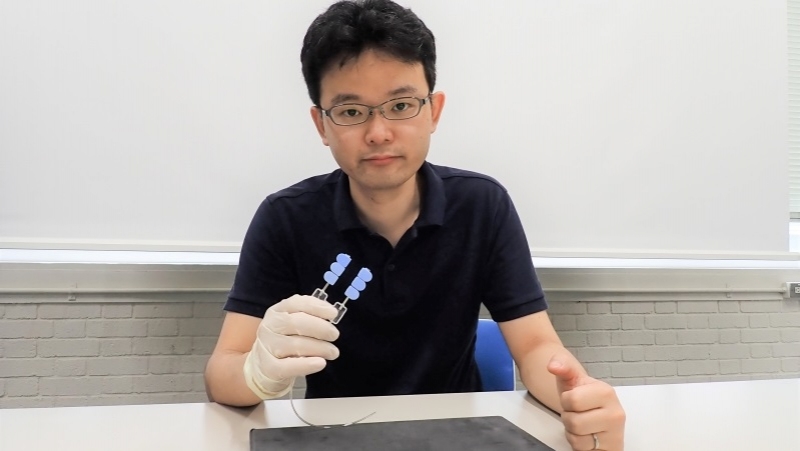
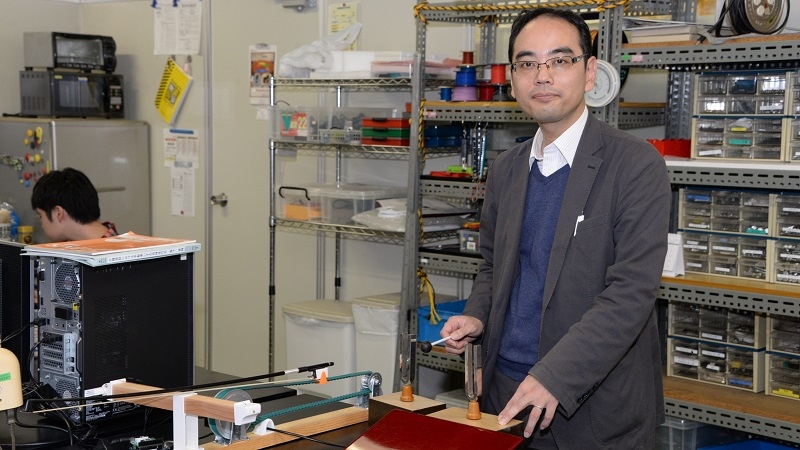
関西大学の高橋智一准教授は、物を吸い着ける方法として負圧に着目し、使い勝手のいいグリッパーを研究する。タコの吸盤を模したグリッパーを紹介した前編に続き、後編では極小の弁(マイクロバルブ)を使ったグリッパーを紹介する。軟らかい物でもつかみやすく、落としにくい構造で、医療関係者も関心を寄せる。
生産現場のロボット化と自動化を支援するウェブマガジン
RECENT POSTS
関西大学の高橋智一准教授は、物を吸い着ける方法として負圧に着目し、使い勝手のいいグリッパーを研究する。タコの吸盤を模したグリッパーを紹介した前編に続き、後編では極小の弁(マイクロバルブ)を使ったグリッパーを紹介する。軟らかい物でもつかみやすく、落としにくい構造で、医療関係者も関心を寄せる。

関西大学の高橋智一准教授は、ものを吸い付ける負圧に注目し、汎用性の高いグリッパーを研究する。2つのグリッパーの研究に取り組み、前編ではタコの吸盤にヒントを得たグリッパーを紹介する。固いものも軟らかいものも、平面でも曲面でもつかめ、固いものなら最大5kg程度までハンドリングできる。
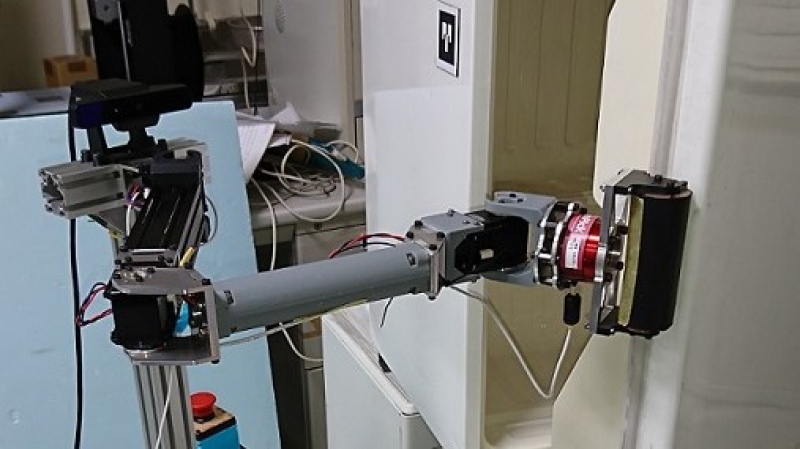
産業用ロボットをさまざまな場面で使うには、単にプログラミングされた動作を正確にこなすことだけではなく、環境の変化に柔軟に対応する適応性も求められる。小林祐一准教授は、センシング技術や制御技術を生かしてロボットの適応性を高める研究に取り組む。後編では、力覚センサーから得られる測定データを基に、ドアの形状や構造をロボットに推定させ、最適な開閉の動作をさせる研究を紹介する。
最近は深刻な人手不足を背景に、産業用ロボットの活躍の場が急速に広がっている。だが、ロボットをさまざまな場面で使うには、単にプログラミングされた動作を正確にこなすことだけではなく、環境の変化に柔軟に対応できるような適応性も求められる。小林祐一准教授は、センシング技術や制御技術などを生かしてロボットの適応性を高める研究に注力する。前編では、あいまいな自然言語を協働ロボットに認識させる研究を取り上げる。
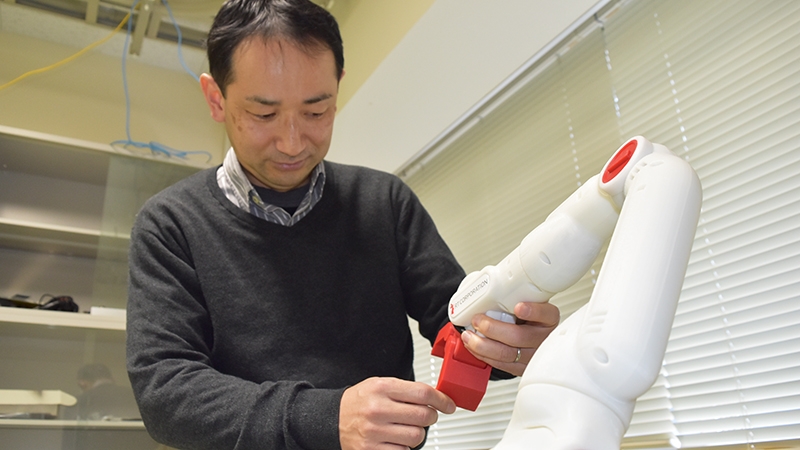
近年、ロボットの性能向上や適用範囲の拡大により、ロボットへの教示(ティーチング)作業を簡単にする技術へと注目が集まる。前田雄介准教授は、ロボットの制御ソフトウエアを軸に、教示を容易にする技術を研究する。直近では、無人搬送車(AGV)や「お掃除ロボット」といった移動式ロボット向けの技術を、固定した産業用ロボットに応用する。

近年、ロボットの性能向上が目覚ましい。それに伴い、ロボットに動作を教える教示作業も難しくなる。またロボットの適用範囲の拡大により、現場の担当者がロボットを教示できない事例も増えている。そんな時代にこそ、「ロボットの教示作業を簡単にする技術が必要」と前田雄介准教授は研究に取り組む。
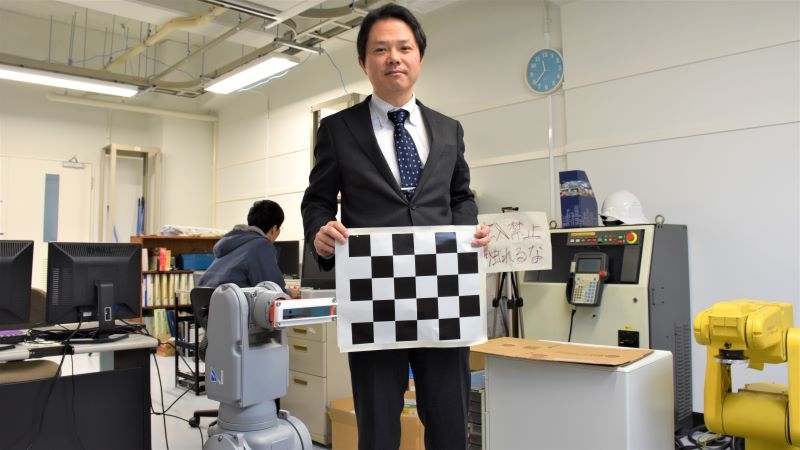
「人の生活と作業を支援するメカトロニクスシステム」をテーマに、センサーで周囲を認識して動く支援ロボットの開発を手掛ける飛田和輝准教授。後編では「センサーで測る」からもう一歩踏み込み、ロボットが人の行動を認識し、次の動作を予測して先回りして動く技術の研究を取り上げる。人とロボットが「あうん」の呼吸で連携する協調作業を目指す。
「人の生活・作業を支援するメカトロニクスシステム」をテーマに研究をする飛田和輝准教授。自走式のロボット(搬送車)の開発に取り組み、さまざまなセンサーで集めた情報から、ロボット自身が正確な位置を把握して動く。現状は福祉向けのものがメインだが「基礎となる技術は産業用ロボットにも通じる」と飛田准教授は話す。
産業用ロボットに人と同等以上の機能を持たせることを最終的な目標に掲げる横小路教授。後編では、人の手のように何でもつかめるロボットハンドの研究を紹介する。目指したのは、さまざまな形状とサイズの部品で構成される製品の組み立てを、一つのロボットハンドでこなす汎用性だ。
産業用ロボットもサービスロボットも、人の仕事をロボットに任せようとの考えが原点にある。つまり、ロボットの進歩は人の機能に近付くことに他ならない。横小路泰義教授は人の外見や形状ではなく機能に着目し、ロボットで実現しようと研究する。多岐にわたる研究テーマのうち、前編では遠隔操作技術を紹介する。

