
SIerの負荷軽減へ、ロボットメーカー発のデジタル基盤/FUJI
システムインテグレーター(SIer、エスアイアー)の業務を支援する――。電子部品実装ロボットメーカーで産業用ロボットメーカーでもあるFUJIは、このコンセプトでSIer向けのデジタルプラットフォーム(基盤)「e-Sys(イーシス)」を開発し、今年4月から運用を始めた。SIerとエンドユーザーとの間で発生する仕様などの認識違いを防ぎ、システムの設計や構築にかかる業務負荷を軽減する。利用者数を今年度中に70社まで増やす考えだ。
生産現場のロボット化と自動化を支援するウェブマガジン
RECENT POSTS
システムインテグレーター(SIer、エスアイアー)の業務を支援する――。電子部品実装ロボットメーカーで産業用ロボットメーカーでもあるFUJIは、このコンセプトでSIer向けのデジタルプラットフォーム(基盤)「e-Sys(イーシス)」を開発し、今年4月から運用を始めた。SIerとエンドユーザーとの間で発生する仕様などの認識違いを防ぎ、システムの設計や構築にかかる業務負荷を軽減する。利用者数を今年度中に70社まで増やす考えだ。
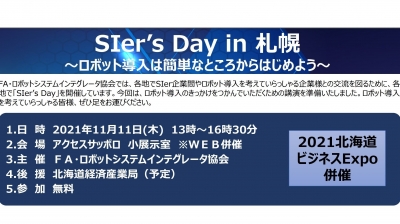
FA・ロボットシステムインテグレータ協会(SIer協会、会長・久保田和雄三明機工社長)は11月11日、札幌市白石区のアクセスサッポロ小展示室で「SIer’s Day(エスアイアーズデイ) in札幌 ~ロボット導入は簡単なところからはじめよう~」を開催する。ロボットのシステムインテグレーター(SIer、エスアイアー)同士や、SIerとロボット導入を検討する企業などが交流を図るためのイベントだ。北海道最大級のビジネスイベント「2021北海道ビジネスエキスポ」に合わせて開催する。

自動化関連のシステム開発などを手掛けるGRIPS(グリプス、千葉県流山市、森田康社長)は10月18日、小さなデスクトップ型の垂直多関節ロボット「Dobot(ドゥーボット)MG400」の販売を開始したと発表した。

ASPINA(アスピナ)ブランドで展開するシナノケンシ(長野県上田市、金子元昭社長)は10月21日、同社のロボットハンドがグッドデザイン賞を受賞したと発表した。受賞したのは電動ロボットハンド「ARH350A」。3爪構造でさまざまな形状や姿勢の物をつかめ、ハンドの中心部は中空構造でカメラやセンサー、エアの配線・配管を通せる。審査員からは「作業の自動化や人間との共同作業など、さまざまな応用の可能性を開く優れたデザインである」と評価された。
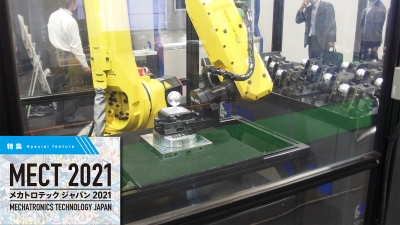
「特集MECT2021」のvol.4~vol.7では、「メカトロテックジャパン(MECT)2021」で見つけたロボット関連の製品を数多く紹介してきたが、まだまだ会場内にはロボットを使った自動化システムがたくさん展示されている。それらを展示する各メーカーは「ロボットや自動化システムへの注目度は高い」と口をそろえる。「vol.8」でも引き続き、会場で話題を呼んだロボット関連の展示を多数紹介していく。
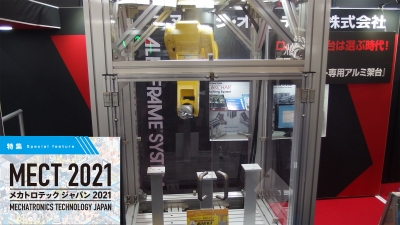
「特集MECT2021」では連日、「メカトロテックジャパン(MECT)2021」で見つけたロボットシステムやロボット関連の製品を紹介してきたが、会場にはロボット・自動化に関する展示がまだまだある。明日10月23日はMECT2021の最終日。「vol.7」では、会場で見つけたロボット関連の見逃せない展示や製品を次々に取り上げていく。

「メカトロテックジャパン(MECT)2021」では、工作機械に加工対象物(ワーク)を付け替えるローディング/アンローディング作業だけでなく、加工に付随するさまざまな作業の自動化提案も多い。工作機械に内蔵する機器の段取り(アタッチメント変更)作業や、加工後のバリ取りや測定などを人手からロボットに置き換える提案が相次ぐ。「vol.6」では、そうした多様なロボットシステムを取り上げる。
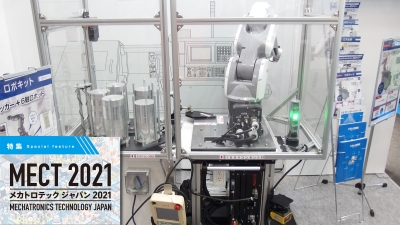
「メカトロテックジャパン(MECT)2021」の会場では、ロボットシステムをパッケージ化するなどして、工作機械の「手軽な自動化」をアピールする企業が多い。まだまだロボットの活用が進んでいない中小企業などにも自動化の裾野を広げるため、各社は工夫を凝らしたシステムを提案する。
デンソーウェーブ(愛知県阿久比町、相良隆義社長)は10月19日、中型の協働ロボット「COBOTTA PRO(コボッタプロ)」を開発したと発表した。2022年4月の発売を予定する。コボッタプロは、先端の最大速度が毎秒2500mmと高速で、繰り返し精度は±0.04mmと高精度。

TRUST SMITH(トラストスミス、東京都文京区、大澤琢真社長)は10月15日、把持対象物をカメラで写すだけで、ロボットハンドが最もつかみやすい位置を検出する「モデルレス物体認識アルゴリズム」を実用化したと発表した。このアルゴリズム(データ処理方法)は被写体との距離を計測できる深度カメラで取得した画像をもとに、さまざまな位置や角度から検証して最もつかみやすい位置を割り出す。ロボットに物の情報を学習させる必要がなく、学習のための時間や手間を不要にできる。

