[気鋭のロボット研究者vol.33]ロボットが動作を調節しながら研磨【前編】/埼玉大学 辻俊明 准教授

辻俊明准教授は、ロボットの力計測と信号処理を研究テーマに据える。人の動作のメカニズムを明らかにしてロボットで再現する中で、研磨の自動化にも取り組む。研磨時の力や音などのデータを収集してロボットの動作に補正をかけ、ワーク(対象物)の傾きや形状に合わせて研磨できる技術を開発した。
3つのデータで補正
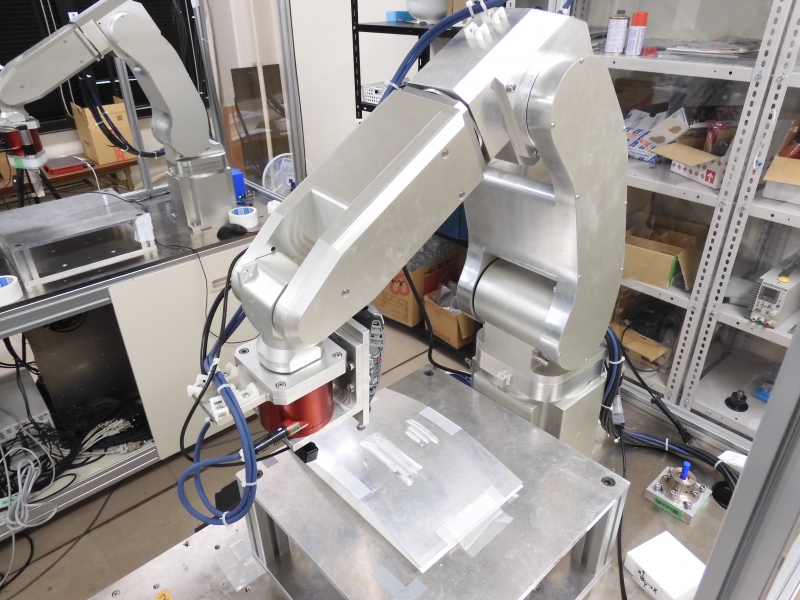
研磨音などのデータを基にロボットの動作を補正する
辻准教授の研究テーマはロボットの力計測と信号処理で、ロボットによる人の動作の再現を目指す。現在自動化に取り組む作業の一つが研磨だ。研磨の自動化ニーズは高いが、ロボットの動作が少しでもずれると十分な品質を得られないため、実現するのが難しい。
そこで、辻准教授は力覚センサーとマイク、カメラを活用した。人が研磨する際の力や音、グラインダーの位置などをデータ化し、それらのデータと一致するよう、ロボットの動作に補正をかける。設定した一定の強さや経路で研磨を繰り返すのではなく、ワークの傾きや形状に合わせて研磨できるようになる。
この際、単に力や音などのデータを取得するだけでなく、異なる種類のデータを統合するのが重要という。「例えばワークにグラインダーを押し付ける力だけを計測しても、ワークの固さは分からない。押し付けた際のグラインダーの高さの変化も計測して、初めてワークの固さも分かる。複数のデータを組み合わせると加工環境の認識に役立つ」と説明する。
動作精度だけでは限界
辻俊明准教授は「研磨の自動化は非常に難しい」と語る
従来のロボットシステムは動作精度を高めるのが主流だったが、より高度な動作を自動化するにはロボットの動作の柔軟性を上げるのが必要と考える。
「そもそも人の手作業も精度に優れるわけではなく、手先の動きを柔軟に調節して高精度に仕上げている。ロボットの動作精度だけを追求しても限界がある」と訴える。
今後はあらゆる形状の自動研磨の実用化に向け、研磨を得意とする加工業とも協業し研究を進める。
――後編に続く
(ロボットダイジェスト編集部 水野敦志)
辻俊明(つじ・としあき)
2006年慶応義塾大学大学院理工学研究科総合デザイン工学専攻博士課程修了、博士(工学)。同年、東京理科大学工学部第一部(現工学部)機械工学科嘱託助手。07年埼玉大学工学部電気電子システム工学科助教、12年から現職。この間、09年から14年まで科学技術振興機構(JST)「さきがけ」研究員も兼任。1978年香港生まれの46歳。
関連記事:[気鋭のロボット研究者vol.32]球状の歯車が無制限に回転【前編】/山形大学 多田隈理一郎 教授
関連記事:関連記事:[気鋭のロボット研究者vol.31]「進化計算」を画像処理に【前編】/岐阜大学 佐藤惇哉 助教
関連記事:関連記事:[気鋭のロボット研究者vol.30]位置検出に「光と影」を【前編】/産総研 栗田恒雄 研究グループ長

