協働ロボ・移動ロボ向けのユニットを開発/日本精工
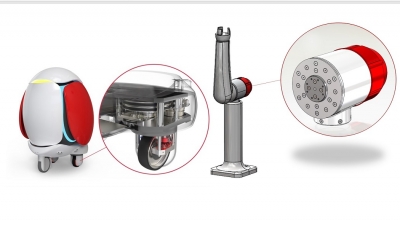
日本精工は2月24日、「協働ロボット用アクチュエータ」と「アクティブキャスタ」の2製品を開発したと発表した。「協働ロボット用アクチュエータ」はモーターと減速機を組み合わせた、協働ロボットの関節向けの製品だ。最大の特徴は、出力側にかかる力を入力側に伝達できるバイラテラルギアを減速機構に採用したこと。人との衝突など、ロボットアームにかかる外力をより繊細に検出できるため、安全性を高められる。横浜国立大学の藤本康孝教授などの研究チームが開発した技術を応用した。