
[活躍するロボジョvol.12]なせば成る!/チトセロボティクス 立花京さん
ロボット業界で活躍する女性にスポットを当てた連載「活躍するロボジョ」。12回目は、チトセロボティクス(東京都文京区、西田亮介社長)の創業メンバーで役員でもある立花京さんを紹介する。メカ設計が好きで、エンジニアとしてはエンドエフェクターの開発を担う。「シンプルな機構で高度な作業ができればそれに越したことはない。頭をひねる苦労はあるけれど『なせば成る』の精神で取り組んでいます」と立花さんは語る。
生産現場のロボット化と自動化を支援するウェブマガジン
RECENT POSTS
ロボット業界で活躍する女性にスポットを当てた連載「活躍するロボジョ」。12回目は、チトセロボティクス(東京都文京区、西田亮介社長)の創業メンバーで役員でもある立花京さんを紹介する。メカ設計が好きで、エンジニアとしてはエンドエフェクターの開発を担う。「シンプルな機構で高度な作業ができればそれに越したことはない。頭をひねる苦労はあるけれど『なせば成る』の精神で取り組んでいます」と立花さんは語る。
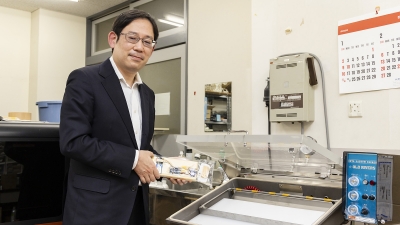
センサーや電気回路を真空パックすれば、水中ロボットが作れるのではないか――。例えばそんな思いつきも、近畿大学の柴田瑞穂准教授の手にかかれば本格的な研究となる。ロボットに関して「やればできそうだが、まだ誰も本格的に実験したことのない手法」を、まじめに評価、検討するのが、柴田准教授のスタンス。元は思いつきでも、検証してみれば期待以上の可能性を見いだすこともある。
近畿大学の柴田瑞穂准教授は、ロボットに関して「やればできそうだが、まだ誰も本格的に実験したことのない手法」を、まじめに評価、検討する。ロボットの外装を樹脂に置き換えるとどうなるのか。センサーや電気回路を真空パックするとどうなるのか。「思いついたことをやってみるのは、研究のフィールドではとても重要」と話す。
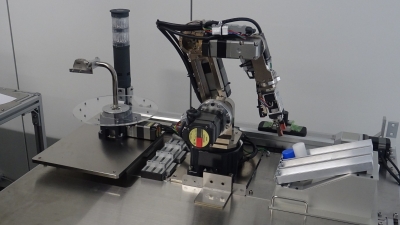
ロボットダイジェスト編集部が注目したロボット関連の製品を紹介する「注目製品PickUp!」。今回は、オリムベクスタ(東京都台東区、木方敬社長)が昨年末に発売した小型の垂直多関節ロボットアーム「OVR350K1」を取り上げる。モーターが共通する製品なら単軸ロボットから5軸のOVR350K1に至るまで、全て同じコントローラーで制御できるなど使い勝手の良さが特徴だ。自作ロボットを検討する顧客にも「ちょうどいい」スペックで、「導入しやすく、業種を問わず幅広い需要があり、潜在需要は非常に大きい」とみる。
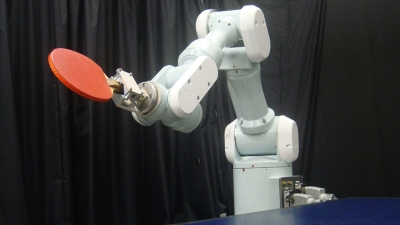
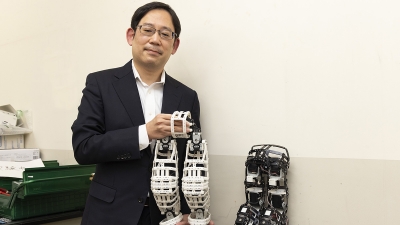
南山大学の中島明教授は、人のような器用さや巧みさを備えたロボットの実用化を目指し、多指ハンドや卓球ロボットの研究に力を注ぐ。後編では卓球ロボットについて取り上げる。人と何回もラリーを続けられる卓球ロボットを開発するため、中島教授は画像センシング技術やロボットの制御技術の研究に努める。
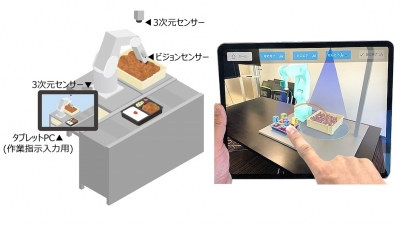
三菱電機は2月28日、同社が開発する人工知能(AI)技術「Maisart(マイサート)」の一つとして、ロボットの動作プログラムを自動生成する「ティーチングレスロボットシステム技術」を開発したと発表した。

「2022国際ロボット展(iREX2022)」では併催企画ゾーンとして、物流の自動化に貢献するマテリアルハンドリング(マテハン)機器の業界団体の日本物流システム機器協会が「ロボット&マテハンゾーン」を主催する。同協会の会員で同ゾーンに出展するオークラ輸送機(兵庫県加古川市、大庫良一社長)とIHI物流産業システム(東京都江東区、笠俊司社長)に出展コンセプトなどを聞いた。いずれも物流現場の人手不足などの課題解決のために、ロボットをはじめ多彩なマテハン機器を使った高度な自動化を提案する。
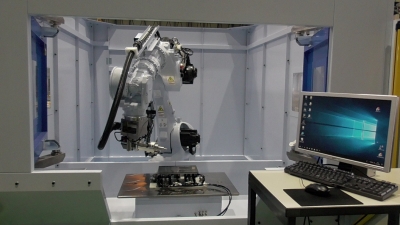
ロボットシステムを企画、開発する日本省力機械(群馬県伊勢崎市、田中章夫社長)は2月14日、産業用ロボットによる加工経路を自動生成する「自動ティーチング」の技術で国内特許を取得したと発表した。部品のバリ取りや研磨、溶接、シーリングなど多様な加工に利用できる。非接触センシング技術で加工対象物の断面形状のデータを取得。独自のアルゴリズム(問題解決手順)で加工位置を数十秒から数分程度で把握し、加工経路を自動生成する。
米国、中国、欧州では国際特許を出願中だ。

多指ハンドロボットと卓球ロボットの2つを主な研究テーマに掲げる南山大学の中島明教授。前編では、大学院の頃から研究に取り組む多指ハンドについて紹介する。ロボットに器用さや巧みさを与えるため、摩擦係数や形状、軟らかさなどが事前に分からない「未知の物体」も安定してつかめる多指ハンドの開発に挑む。

村田機械(京都市伏見区、村田大介社長)の完全子会社で無線ネットワークに関する製品を製造するサイレックス・テクノロジー(京都府精華町、三浦暢彦社長)は1月27日、無線通信技術を使って顧客と製品開発に取り組む拠点「THE BASE(ザ・ベース)」を本社3階に開設すると発表した。開設日は2月1日。

