[気鋭のロボット研究者vol.20]センサーを使わずどこまでできる?【前編】/和歌山大学 土橋宏規講師

産業用ロボットの普及を妨げる要因として、導入や開発にかかる大きなコストが挙がる。和歌山大学の土橋宏規講師は、カメラや触覚センサーを必要としないロボットハンドの機構や把持(はじ)のプロセスを研究する。センサーを使わずにどこまでできるかを追求し、ロボットシステムの可能性を広げる。
重力や滑りも利用
ハンドの指がワークの位置と姿勢を調整してつかむ
ロボットハンドは加工や搬送の対象物(ワーク)に応じて交換するため数が多く、さまざまなセンサーを装着する場合は単価も高くなりがちだ。土橋講師の研究テーマは、低コストの汎用ハンドを開発すること。「多品種生産が当たり前の中小規模の製造業で、ロボットを導入しやすくしたい」と話す。
ハンドの機構として、平行4本指のハンドを採用。4本の指をスライドさせて開閉する。カメラや触覚センサーを使わないということは、把持の前にワークの位置や姿勢を知ることができないということだ。
土橋講師は、どのようにハンドと指を動かせばワークの位置や姿勢を問わず狙い通りに把持できるかを、理論的に導き出す。「指でワークをずらしながら把持することで、一定の範囲内のゆらぎは吸収できると証明できた。あまり重いものは動かせず、表面に傷がつく可能性があるのが課題」と話す。
また、ワークの向きを整えるために一旦置いて持ち替えるなど、一般的な把持計画には非効率な部分がある。ワークを持ち替える動作を1回でも減らせれば効率化につながる。
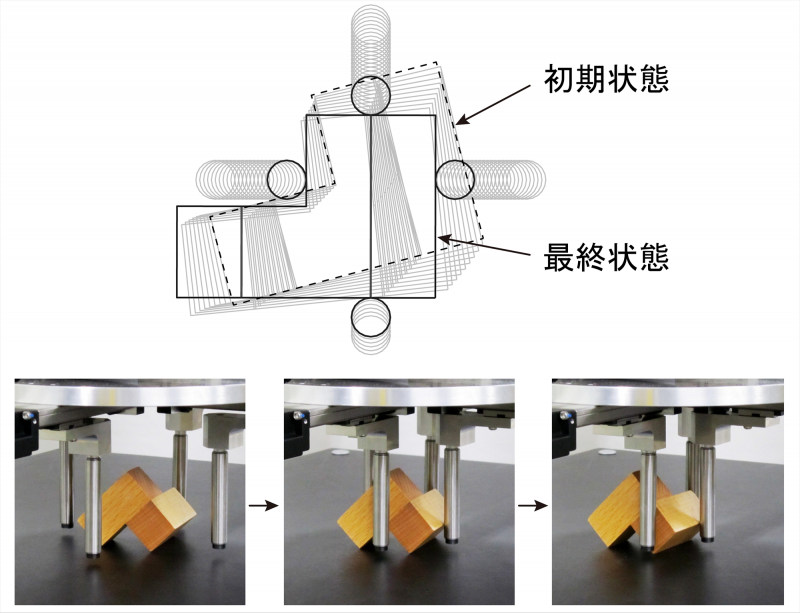
そこで不安定な姿勢でワークを離し重力を利用して転倒させたり、つかんだハンドの中でワークを滑らせて向きを微調整するなどの工夫を考案。1回の把持で動かす範囲を広げることで、条件次第では持ち替えずに目的の姿勢にすることができた。
後編では、実際に開発した把持計画の一端を紹介する。
――後編へつづく
(ロボットダイジェスト編集部 松川裕希)
土橋宏規(どばし・ひろき)
2012年京都大学大学院工学研究科博士課程修了、関西学院大学理工学部契約助手。13年立命館大学理工学部助教、17年和歌山大学システム工学部講師。12年計測自動制御学会学術奨励賞、日本ロボット学会研究奨励賞、16年システム制御情報学会論文賞、20年日本機械学会奨励賞など受賞。「ワールドロボットサミット」ものづくり競技委員会委員。大阪府出身の37歳。
関連記事:[気鋭のロボット研究者vol.20]/和歌山大学 土橋宏規講師【後編】(9月後半に公開予定)

