[気鋭のロボット研究者vol.16]爪の色と力の関係性を探る【後編】/名古屋大学大学院 大岡昌博教授

大岡教授は人とロボットの触覚について研究する。前編では光の反射を応用したロボット用の3軸触覚センサーを紹介したが、今回は人の触覚に焦点を当てる。最近は人工知能(AI)の一種であるディープラーニング(深層学習)を活用し、爪の色の状態と、指先にかかった3軸方向の力の大きさの関係性を探る研究に取り組む。
ディープラーニングを活用
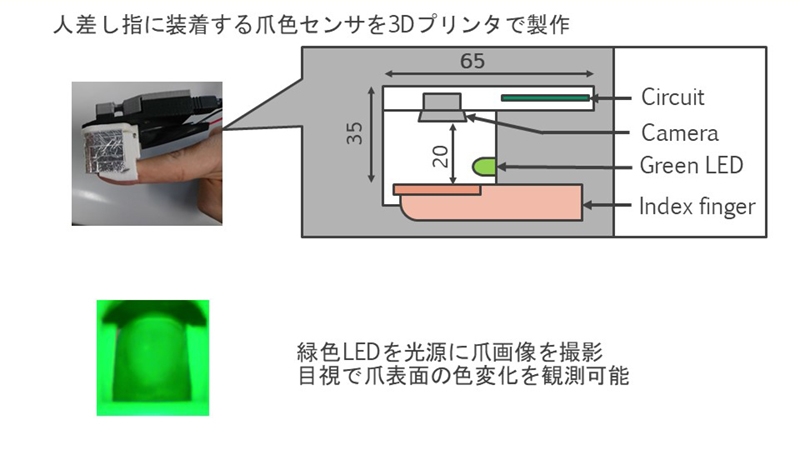
大岡教授らが試作した爪色センサー(提供)
大岡教授はロボット用の3軸触覚センサーだけではなく、人の触覚に関する研究にも力を入れる。2019年からは研究室の学生と一緒に、爪の色の状態と、垂直方向と水平方向2軸の計3軸にかかった力の大きさの関係性を探る研究に着手した。
何も力を加えていない状態だと、爪の色は薄いピンクだが、物に触れるなどして指先に力が加わると、爪の色は赤や白に変わる。どれだけ変色するかは、その時にかかった力の大きさ次第で決まる。

電子天秤と組み合わせてデータを集める(提供)
そこに目を付けた大岡教授らは3Dプリンターを使い、専用のカメラや光源を搭載した「爪色センサー」を試作した。電子天秤(てんびん)とセットで使い、爪の色の画像データや、力の大きさなどの数値データを集めた。
「VGG16」と呼ばれる、画像処理の分野で使われるディープラーニングの技術を駆使し、これらのデータを解析して爪の色と力の大きさの関係性を導いた。「爪の色の画像データが大量に必要で、そのデータを集めるのに苦労した。写真ではなく動画を撮影することで効率的にデータを収集した」と振り返る。
職人の手作業も将来は…

「熟練の技能が求められる職人の手作業も将来はロボットで再現できるだろう」と大岡教授は期待する
目下の課題は爪色センサーの小型化。より小型で安価なカメラを採用するなどして、全体のサイズダウンを図る考えだ。
また、爪の色の状態から指先にかかった力の大きさをより正確に推定できるよう、画像データの解析精度も高めていく。
「爪の色から微妙な力加減を読み取れれば、熟練の技能が求められる職人の手作業も将来はロボットで再現できるだろう」と期待を寄せる。
――終わり
(ロボットダイジェスト編集部 桑崎厚史)
大岡昌博(おおおか・まさひろ)
1986年名古屋大学大学院博士課程修了、富士電機総合研究所入社。92年名古屋大学工学部講師、93年静岡理工科大学助教授。2003年名古屋大学大学院情報科学研究科助教授、07年同准教授。09年から現職。最近は触覚が錯覚を起こす現象のメカニズムを解明する研究にも注力する。趣味は音楽鑑賞。愛知県出身の62歳。

