[注目製品PickUp! vol.79]静電チャック技術を応用し、多様な立体形状もつかめるように/クリエイティブテクノロジー「ソフトグリッパー」
半導体のウエハー搬送などで主に使われる静電チャックをコア技術とするクリエイティブテクノロジー(川崎市高津区、辰己良昭社長)は、その技術をロボットハンドにも応用し「ソフトグリッパー」を開発した。静電チャックは通常、平面形状のワークを吸着して持ち上げるが、ソフトグリッパーは球体や円柱など多様な形状のワークを1台でつかめるため、多品種の生産現場の自動化に役立つ。
多品種の生産ラインに有効
クリエイティブテクノロジーは、静電気でワークを吸着する静電チャック技術を応用し、ロボットハンドを設計、開発する。
そのうちの一つ「ソフトグリッパー」は、球体や円柱など多様な形状のワークを把持できる。研究開発部統括部長を務める平野信介取締役は「静電チャックはその原理からワークにダメージを与えないが、基本的に吸着できるワークは平面形状に限られる。一方ソフトグリッパーはワークを傷つけない特徴はそのままに、立体形状物も安定してつかめる」と語る。
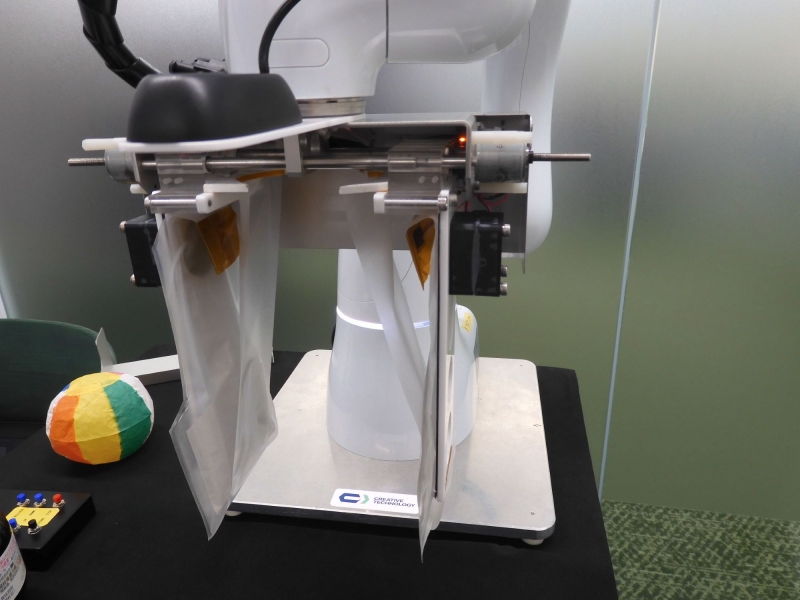
「ソフトグリッパー」の爪は、電極シートをエアバッグで覆う構造
同製品は2爪グリッパーとなっており、爪はそれぞれ長方形の電極シートを内蔵する。ワークをつかむ際は電極シートに電圧を加えて静電気を発生させ、ワークの電荷と引き合う力を利用して電極シートとワーク間の摩擦力を上げ、重い物も持ち上げられる。
この電極シートを、エアバッグ内に入れているのが工夫点だ。小型のファンをハンドに搭載しており、把持する際エアバッグ内にエアを送り込むことで、エアバッグがワークを包み込むような形状になる。初めは電極シートのみの構造だったが、エアバッグに入れることで把持の安定性が上がった。
「ソフトグリッパー一つで多様な形状のワークをつかめるため、コンベヤー上を複数種類のワークが流れるようなラインでも、段取り替えせずに次々とピック&プレースできる」と平野取締役は自信を見せる。
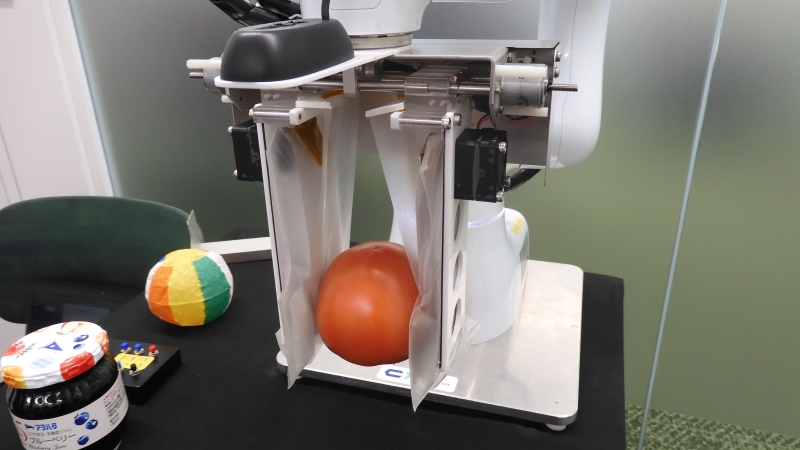
トマトや紙風船に、金属加工品も
ガラス製の瓶でも、内容物があるか表面に紙が巻いてあれば運べる
さまざまな形状のワークをつかめるが、電気的な力を利用するため、当然ガラスやプラスチックなど絶縁体に対しては可搬質量が小さくなる。ただ、プラスチックやガラス製の容器でも内容物があれば、重い物でも持ち上げられるケースもあるという。
「例えば水の入ったペットボトルであれば、水の電荷を利用してつかめる。他にはジャム瓶のように容器の表面に紙が巻いてあれば、その部分を引き寄せて持ち上げることも可能」と言う。
他にはワークの表面状態も把持に影響する。凹凸が大きい場合や表面が濡れている状態では、つかむことが難しくなる。とはいえ、裏を返せばこれらに当てはまらない物体であれば搬送が可能であり、同製品ではトマトや紙風船など潰れやすい物の搬送テストにも成功している。
また、これらの柔らかい物体に加え金属加工品にも使えるという。「金属に対しては静電気力が強く作用するため、ソフトグリッパーの可搬質量は、表面が円滑な金属加工品であれば5kg~10kgほど」と話す。

